
我公(gōng)司為(wèi)中(zhōng)國(guó)南方電(diàn)網開發的智能(néng)巡檢機器人可(kě)以完全自主、本地或遠(yuǎn)程控制方式代替或輔助人工(gōng)巡檢。巡檢包括設備溫度、開閉狀态、設備噪聲等。具(jù)有(yǒu)檢測方法多(duō)樣化、智能(néng)化、巡檢工(gōng)作(zuò)規範化和客觀化的特點。該系統集成了檢測内容、時間、路線(xiàn)和報告管理(lǐ),實現了檢測全過程管理(lǐ),并提供數據分(fēn)析和決策支持。有(yǒu)效地克服了傳統人工(gōng)檢測勞動強度大、工(gōng)作(zuò)效率低、檢測質(zhì)量分(fēn)散、手段單一等缺點。
智能(néng)巡檢機器人能(néng)夠發現變電(diàn)站當中(zhōng)的問題,而且還能(néng)夠進行及時處理(lǐ)。當變電(diàn)站在現場工(gōng)作(zuò)時,智能(néng)巡檢機器人可(kě)以靈活地移動到工(gōng)作(zuò)位置。借助于系統的雙向語音對講功能(néng),可(kě)以實現變電(diàn)站的遠(yuǎn)程視頻工(gōng)作(zuò)指導,同時代替現場管理(lǐ)人員的職責
另外,智能(néng)機器人巡檢系統通過視頻遠(yuǎn)程傳輸和遠(yuǎn)程控制功能(néng),可(kě)以實現變電(diàn)站巡檢的遠(yuǎn)程可(kě)視化。使用(yòng)遠(yuǎn)程集中(zhōng)控制模塊:建立智能(néng)機器人巡檢系統的遠(yuǎn)程集中(zhōng)控制中(zhōng)心,實現多(duō)台變電(diàn)站機器人系統在運行維護主站的統一協調和集中(zhōng)控制,為(wèi)變電(diàn)站無人值守模式的推廣打下堅實的基礎。
這是我公(gōng)司為(wèi)中(zhōng)國(guó)南方電(diàn)網開發的室内巡檢機器人,随着我們人工(gōng)智能(néng)技(jì )術不斷的創新(xīn),巡檢科(kē)技(jì )也變得越來越好,室内巡檢機器人可(kě)以針對一些高危且複雜多(duō)變的工(gōng)作(zuò)場合,通過巡檢設備的視覺、語音識别、激光測量等手段來完成巡檢工(gōng)作(zuò),幫助企業大大提高工(gōng)作(zuò)效率,使得室内巡檢機器人擁有(yǒu)更多(duō)的優勢及功能(néng)。
室内巡檢機器人具(jù)備自主連續地觀測記錄實驗動植物(wù)的狀況并拍攝,并且可(kě)以降低人員出入實驗室需要更換衣服的頻率。
室内巡檢機器人還具(jù)有(yǒu)以下幾個優勢:
● 輕量化設計,具(jù)有(yǒu)優異的巡航能(néng)力。
● 大負載,多(duō)接口可(kě)随意加載各種設備,支持定制設計。
● 多(duō)種安(ān)全防護措施融合一體(tǐ),适應多(duō)種室内應用(yòng)場合。
● 智能(néng)升降,最低高度15cm,最高高度170cm,适應多(duō)個場景。
● 可(kě)識别儀器、儀表、異物(wù)、線(xiàn)纜等,支持數據實時傳輸。

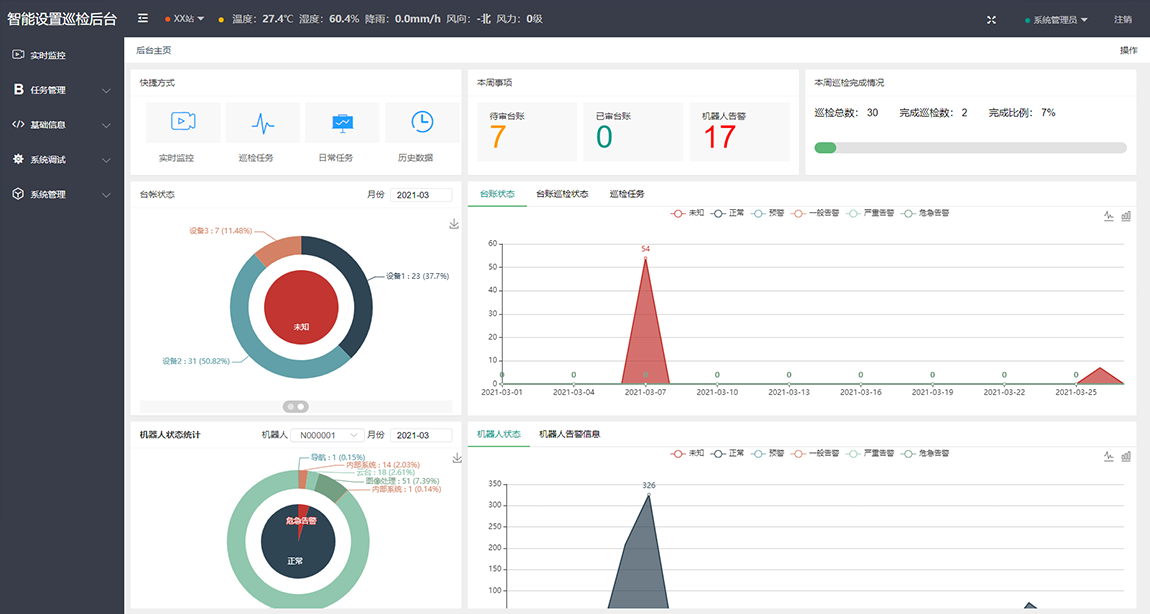
我公(gōng)司為(wèi)中(zhōng)國(guó)南方電(diàn)網機器智能(néng)巡檢平台,管理(lǐ)第一時間提示管理(lǐ)人員進行處理(lǐ)和調度,并且能(néng)夠圖文(wén)并茂的展現隐患現場和工(gōng)單打印,及時加以處理(lǐ),同時結合地圖和數據可(kě)掌握隐患分(fēn)布,調整區(qū)域巡查力度,能(néng)夠實時掌握工(gōng)作(zuò)重點,防隐患于未然.
在應用(yòng)有(yǒu)着顯著的功能(néng)特點:
1、實時監測
通過對應智能(néng)傳感器将數據上傳到雲平台,完成設備的實時監測,在設備出現異常時,平台将數據的計算分(fēn)析結果,即時進行預警。
2、巡檢計劃
管理(lǐ)人員在後台上制定出巡檢計劃,分(fēn)别在手機APP和電(diàn)腦管理(lǐ)端進行任務(wù)展示和提醒,工(gōng)作(zuò)人員每日收到巡檢計劃,按照巡檢要求完成工(gōng)作(zuò),提升巡檢效率。
3、隐患報修
設備發生隐患問題的時候,處理(lǐ)的時間周期長(cháng),管理(lǐ)人員沒有(yǒu)辦(bàn)法對所有(yǒu)事件進行分(fēn)類、處理(lǐ),通過設備雲管理(lǐ)平台,管理(lǐ)人員可(kě)以第一時間找到負責人,及時處理(lǐ)事件,,過程全程跟蹤,降低事件處理(lǐ)周期和事故發生率。
4、數據分(fēn)析
日常巡檢、檢修的數據如何利用(yòng),通過設備雲管理(lǐ)平台,分(fēn)析每日工(gōng)作(zuò)的完成率,事件完成情況,預測的隐患點,各區(qū)域的工(gōng)作(zuò)對比,人員績效考核,實現設備管理(lǐ)工(gōng)作(zuò)痕迹化,讓基層管理(lǐ)工(gōng)作(zuò)紮實可(kě)靠
我公(gōng)司為(wèi)中(zhōng)國(guó)南方電(diàn)網開發的機器人綜合調度軟件,它采用(yòng)基于深度強化學(xué)習的人工(gōng)智能(néng)調度算法,實現了機器人任務(wù)最優分(fēn)配、多(duō)機器人路徑規劃以及機器人交通管理(lǐ),讓機器人集群能(néng)協調在一起工(gōng)作(zuò),互相合作(zuò)又(yòu)互不影響,發揮出最大的系統效能(néng)。
實現AMR的地圖模型建立、多(duō)路徑最優規劃、多(duō)任務(wù)負載均衡、機器人配置服務(wù)、機器人運行狀态監控及管理(lǐ)、系統告警管理(lǐ)服務(wù)等功能(néng)。
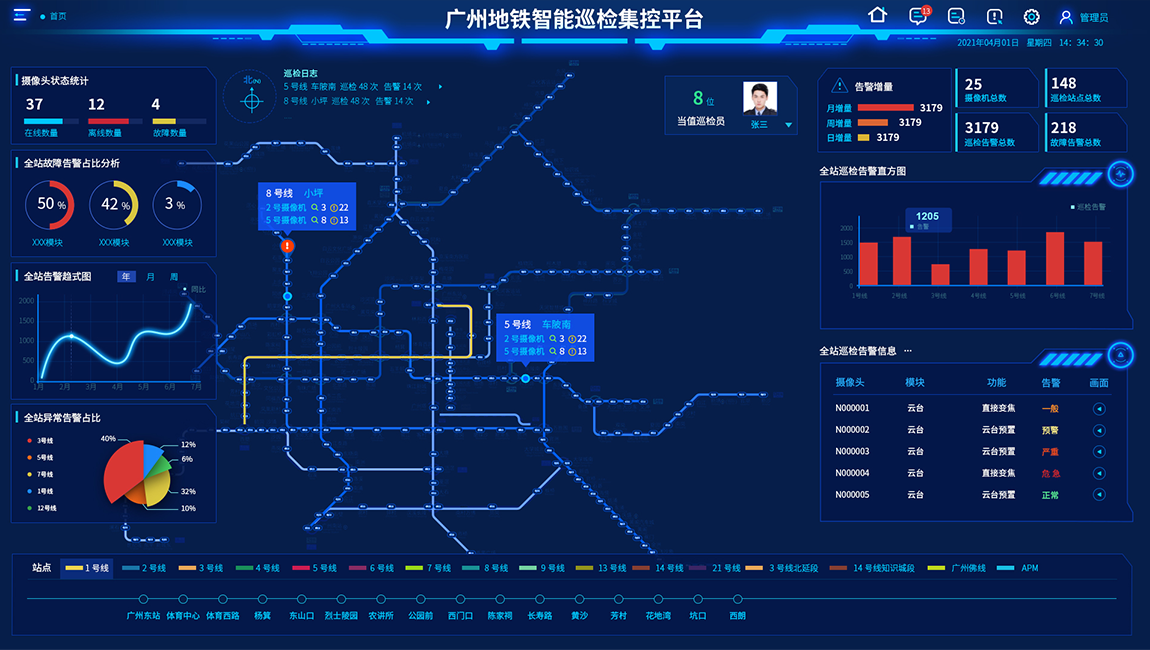
我公(gōng)司為(wèi)廣州地鐵集團開發地鐵智能(néng)巡檢集控平台項目,項目由調度中(zhōng)心/集控中(zhōng)心調度和運行人員實現電(diàn)網監視、控制的人機界面、同時具(jù)有(yǒu)計算、統計、曆史數據信息保存檢索、報表處理(lǐ)和事故追憶等應用(yòng)功能(néng)。主要應用(yòng)于調度中(zhōng)心實現對多(duō)個受控站和電(diàn)網的監視控制,同時也可(kě)以應用(yòng)于中(zhōng)、小(xiǎo)型地區(qū)的調度中(zhōng)心。智能(néng)巡檢集控平台一般由信息采集和命令執行子系統,信息傳輸子系統,信息的收集、處理(lǐ)和控制子系統,人機聯系子系統四部分(fēn)組成。
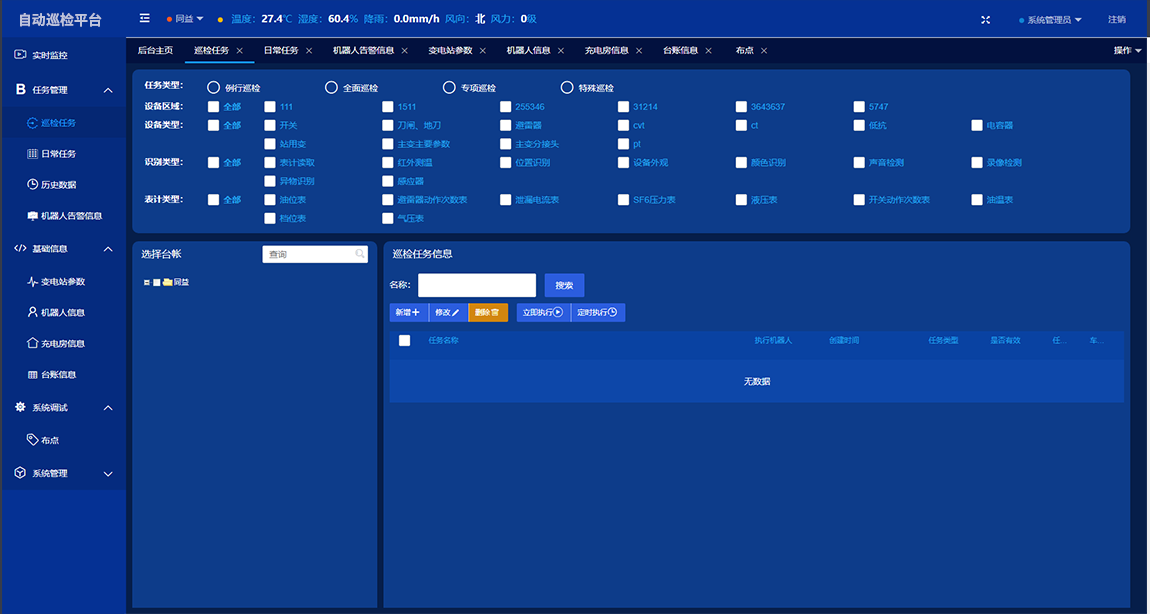
傳統巡檢方式存在着人為(wèi)因素多(duō)、管理(lǐ)成本高、無法監督巡檢人員工(gōng)作(zuò)等缺陷,導緻了對于巡檢工(gōng)作(zuò)的管理(lǐ)過于依賴巡檢人員的自覺性,帶來很(hěn)大的潛在風險,部分(fēn)采用(yòng)安(ān)裝(zhuāng)現場攝像頭和小(xiǎo)神探系統進行巡檢管理(lǐ),但采集的數據及信息對管理(lǐ)人員幫助不大;傳統巡檢方式數據信息化程度低,紙質(zhì)巡檢記錄不利于存放、查詢及事後分(fēn)析。針對傳統巡檢方式的不足,由此我公(gōng)司推出了一款軟硬件相結合的智能(néng)設備自動巡檢平台,運用(yòng)“互聯網+”理(lǐ)念,采用(yòng)“物(wù)聯網+移動應用(yòng)”技(jì )術構築線(xiàn)上線(xiàn)下合一、前段後端貫通、橫向縱向聯動的全方位、全天候、全過程的管理(lǐ)模式,通過大數據處理(lǐ)手段對所需巡檢區(qū)域進行科(kē)學(xué)化、數字化、可(kě)視化巡檢管理(lǐ),實現對企業的人、物(wù)、制度等要素的全面管控。為(wèi)企業巡回檢查制度的落實及資源管理(lǐ)提供了技(jì )術上的保障及手段,實現對巡檢作(zuò)業人員的實時監管,實現設備巡檢、保養、盤點、檢查等多(duō)項業務(wù)應用(yòng),助推各項制度的全面落實,助力責任明确透明,從而降低設備故障率,提高設備可(kě)靠性。
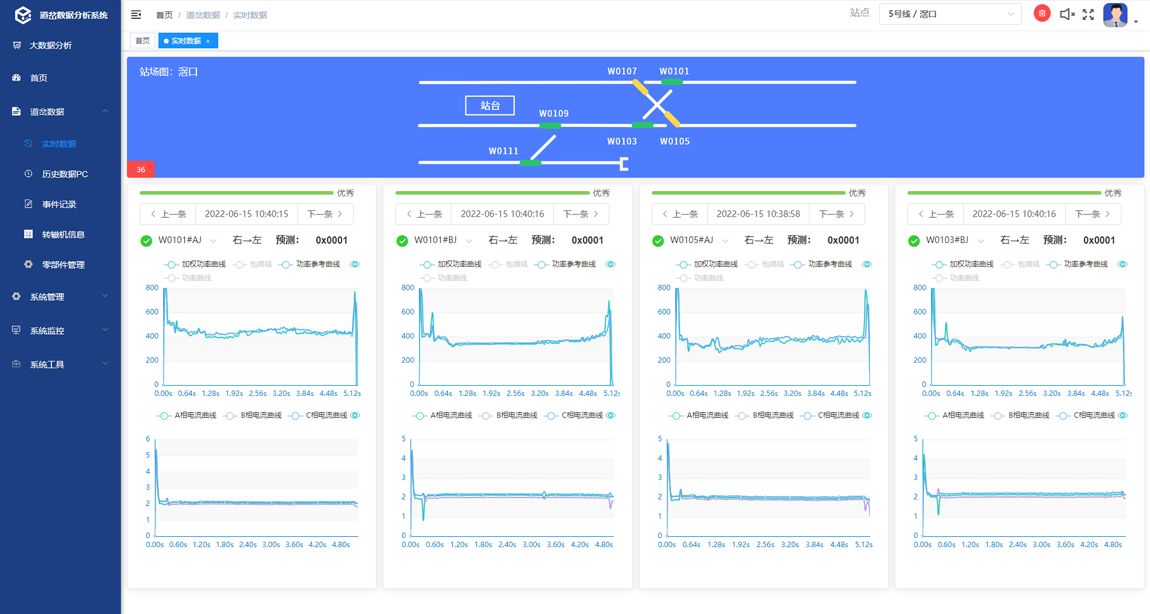
道岔智能(néng)監測分(fēn)析系統是一款能(néng)夠實時監測道岔各種狀态參數,能(néng)夠提前做出設備性能(néng)分(fēn)析、異常預判及故障診斷的智能(néng)監測系統。我們系統以道岔缺口及轉轍機設備狀态的監測分(fēn)析為(wèi)研究重點,利用(yòng)物(wù)聯網相關技(jì )術對傳感器采集數據進行接入和存儲,利用(yòng)大數據相關技(jì )術對監測數據進行處理(lǐ)分(fēn)析,并利用(yòng)機器學(xué)習技(jì )術對數據中(zhōng)的隐藏信息進行挖掘分(fēn)析,綜合實現了對于鐵路道岔缺口的智能(néng)監測以及轉轍機設備健康狀态的預測分(fēn)析。
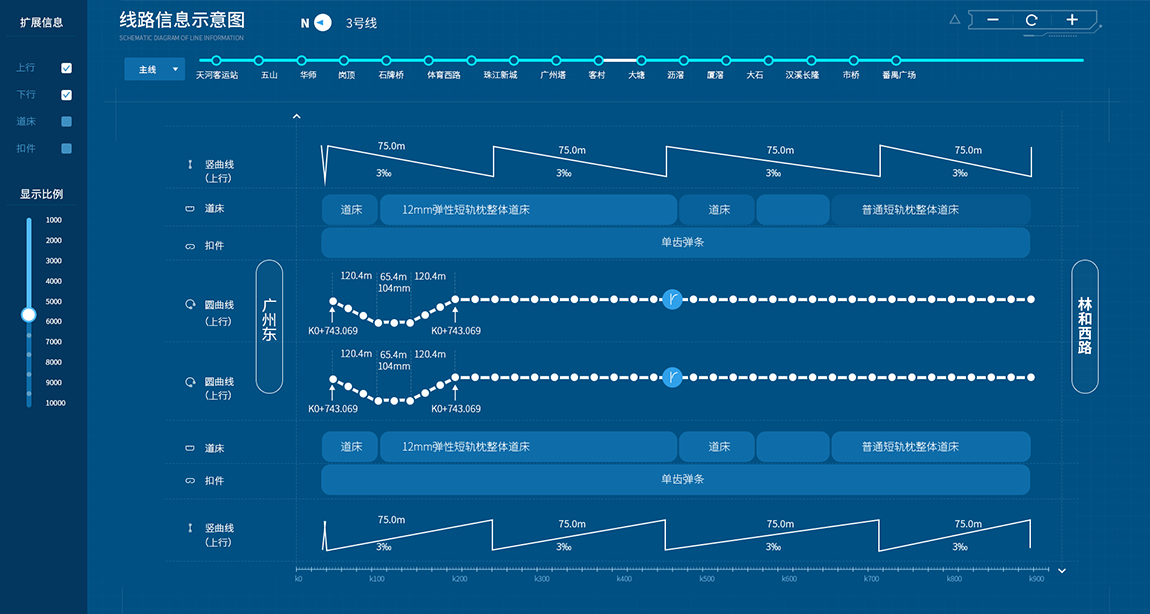
鋼軌智能(néng)維養展示系統提供一種智能(néng)軌道保養維護裝(zhuāng)置及方法,用(yòng)以解決現有(yǒu)對軌道維護保養勞動強度大、效率低、成本高的問題。系統通過在線(xiàn)創建等操作(zuò)完成線(xiàn)路圖及計劃書的智能(néng)生成,以實現線(xiàn)路相關屬性查看即工(gōng)單存儲、下載、打印等功能(néng)。